Chassis
Cahier des charges
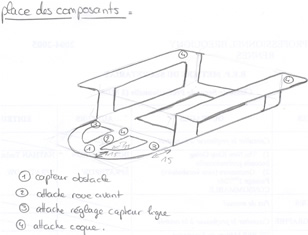
Le chassis doit accueillir l'ensembles des composants :
-
Liste des composants:
- Capteur de collision.
- Deux capteurs de ligne.
- Motoréducteur.
- Deux circuits imprimés (carte PIC et carte fille).
- Un point de liaison avec le sol.
-
Ordre de placement obligatoire de certains composants (de l'avant à l'arrière du chassis):
- Capteur de collision.
- Liaison ponctuel avec le sol.
- Deux capteurs de ligne.
- Motoréducteur.
- Le chassis doit être léger pour faciliter la propulsion du robot.
- Le chassis doit être rigide pour éviter les pertes d'énergie lors des déplacements.
Début de conception
Le choix est porté pour un placement des cartes sur deux étages. Cela permet
d'obtenir une taille du robot réduite.
Il est moins long et la largeur dépend
de la taille de la carte fille. Le robot est donc plus haut mais il est de
la taille la plus réduite, possible avec deux cartes.
Une zone est laissée
à l'avant pour la fixation des autres composants hormis le motoréducteur
devant se placer à l'arrière.
Il se trouvera donc sous le chassis et sous les cartes PIC et fille.

Modèle Numérique
Les côtes sont basées sur la tailles de composants et essentiellement sur la taille de la carte PIC, imposée, dont la position doit être centrale étant donné son rôle de centre de décision.

Construction
Le chassis a été réalisé en aluminium car c'est une matière légère,
rigide, découpable et pliable facilement.
Nous avons d'abord dessiné le chassis sur la plaque d'aluminium.
Ensuite nous avons effectué la découpe avec une pince appelée grignoteuse.

Les parties intérieures ont été évidées pour gagner encore en légèreté.
Puis nous avons plié le chassis à l'aide d'un étau.


Afin de fignoler le chassis, les arretes et les bord sont limés, et le chassis est poncé à la paille de fer fine.